Tim
PILOTE PRO
- Messages
- 1 916
- Réactions
- 1 072
Bonjour à tous,
Je remarque souvent que les pilotes virtuels sont dexcellent ingénieur (créant de fabuleux cockpit, connaissant plus ou moins les systèmes en lisant les FCOMs, utilisant le QRH etc.), mais il manque quelque chose que les livres peuvent difficilement apprendre : le passage de la théorie à la pratique, que jappelle les opérations.
J'aimerais inaugurer une potentielle série de tutoriel à ce sujet, qui ne couvriront pas les systèmes en profondeur (sauf si nécessaire), mais les aspects pratiques.
Pour ceux qui ne le savent pas encore, je vole sur le vrai B737-800 et je calquerai les procédures de ma compagnie dans des exemples pour imager le sujet.
Maintenant que lintroduction est faite, comm'ençons avec le premier sujet.
Noise abatement procedure / Procédures anti-bruit.
Bien que les avions soient de plus en plus silencieux et plus économe, la population se veut de plus en plus réticente à l'idée d'avoir un engin qui gronde au dessus de leur tête. Il a donc fallu mettre en place des règles pour réduire les nuisances sonores.
Sources
Les procédures anti-bruits peuvent être divisées en trois catégories.
1. Les procédures en vols:
L'idée est qu'à partir du moment où l'avion commence sa descente (TOD), l'avion ne fait aucun palier jusqu'à l'atterrissage.
Cela réduit la consommation, les émissions, ainsi que le bruit. Bien que l'idée semble parfaite, elle possède quelques contraintes. Les contrôleurs doivent gérer le flux pour permettre ces descentes et les pilotes doivent pouvoir la réaliser.
Sur B737, nous utilisons un maximum la fonction VNAV du FMS. VNAV va créer une route qui part de la piste avec un plan de 3° (sauf si approche différente) jusqu'au FAP/FAF. Il va calculer la pente pour permettre la décélération et respecter les contraintes de vitesses et daltitude et ainsi déterminer le TOD. Lordinateur la calcule sur base d'une vitesse qui va dépendre du CI mais qui peut à tout moment être changée dans le cas d'une nouvelle instruction de lATC.
Lorsque les vents sont entrés correctement et qu'ils respectent la réalité, VNAV fonctionne vraiment pas mal.
Quelques infos supplémentaires sur mes autres posts: ici
J'essaierai de faire une vidéo qui explique l'utilisation de VNAV en profondeur, mais cela risque de me prendre pas mal de temps.
C'est le profile vertical de l'avion au décollage. Il existe deux types de départ qu'on appelle NADP 1 et NADP 2.
NADP 2 est la plus courante et est utilisée lorsque lobstacle (ou la zone de bruit) est éloignée tandis que le NADP 2 est utilisée lorsque lobstacle ou la restriction sont proches, comme vous pouvez le voir sur l'image ci-dessous. Il existe d'autres départ, comme par ex à Dublin (EIDW), qui utilisent une procédure hybrique.
Attention: petite erreur dans l'image, ce n'est pas 1500 ft, mais 800 ft.
NADP 1:
========================
[Décollage -----> 800 ft AAL]
- l'avion doit garder sa puissance de décollage
- maintenir V2 à V2 + 10kt
- maintenir ses volets
[800 ft AAL ---------> 3000 ft AAL]
- réduction de puissance (automatique sur B737, le FMA passe à N1, options de réglage dans le CDU page 2 de Take Off)
- V2 + 10kt à V2 + 20kt
[3000 ft AAL]
- acceleration pour rentrer les volets
- vitesse libre
========================
NADP 2:
[Décollage -----> 800 ft AAL] identique
- l'avion doit garder sa puissance de décollage
- maintenir V2 à V2 + 10kt
- maintenir ses volets
[800 ft AAL ---------> 3000 ft AAL]
- acceleration pour rentrer les volets
- maintenir une vitesse appropriée pour un MAX RATE OF CLIMB (-UP sur B737)
[3000 ft AAL]
- vitesse libre
En pratique sur B737, la vitesse sur le MCP est réglée sur V2. En passant l'altitude daccélération, on accélère en réglant la vitesse sur -UP et nous rentrons les volets.
Pour info, nous pouvons rentrer les volets à 1° en passant le pointeur blanc, avec un vecteur daccélération positif. En passant le -1 avec un vecteur daccélération positif, nous pouvons rentrer les volets (UP). Une fois que les volets sont entièrement rentrés et au dessus de 3000 ft, nous pouvons sélectionner un mode de montée (LVL CHG, VNAV, VS) et accélérer.
Pas grand chose à dire ici. En général la pente d'approche est de 3°, l'aéroport peut décider de créer une pente différente pour les obstacles/bruit.
La zone d'atterrissage peut aussi être déplacée, toujours dans le but d'être plus haut au point "sensible".
Retarder la sortie des volets et du train d'atterrissage permet de réduire la traînée et ainsi la puissance moteur nécessaire pour maintenir la vitesse.
Dans ma compagnie nous sortons le train à 4nm en VMC et 5 nm en IMC, avant quoi nous avons 5° de volets. De quoi faire peur certains pilotes de ligne qui rejoignent la boite
Plus d'information sur d'autres posts: ici
Certains aéroport ont des contraintes quand à l'utilisation des inverseurs de poussée, généralement après une certaine heure.
2. La gestion de lespace aérien:
C'est beaucoup plus simple que la première partie alors je vais résumer le tout. En fonction des heures, certaines procédures de départ ou darrivée (SID/STAR) seront davantage utilisés que d'autres pour réduire le bruit. L'aéroport de Barcelone est un très bon exemple.
Certaines pistes sont aussi préférée à d'autres, même si le vent n'est pas favorable. Nombreuses de ces pistes sont approuvée jusqu'à 15kt de vent arrière. En tant que pilote, il faut alors bien gérer sa décélération pour ne pas arriver trop vite et éviter une "High Energy Approach (HEA)".
3. La gestion du bruit au sein de l'aéroport:
Certains aéroport limitent l'utilisation de l'APU à seulement quelques minutes après l'arrivée / avant le départ. On préconise également le roulage sur 1 seul moteur (dans le cas d'un bi-moteur).
Sur B737, nous avons une période de refroidissement de 3 minutes avant de pouvoir couper un moteur (en opération normale, pour éviter un choc thermique. En cas d'urgence ou dévacuation, cette règle n'est évidemment pas dapplication).
===============================
Toutes les informations sont contenues dans les cartes d'approches de votre aéroport de destination (catégorie GEN). Dans ma compagnie, nous avons également un briefing pour chaque aéroport qui résume ces particularités.
===============================
Voilà qui termine ce premier tutoriel. Je pense que le prochain sujet sera le prochain sujet portera sur le setup du CDU, mais n'hésitez pas à proposer les sujets que vous souhaitez développer.
Amicalement
Tim
Je remarque souvent que les pilotes virtuels sont dexcellent ingénieur (créant de fabuleux cockpit, connaissant plus ou moins les systèmes en lisant les FCOMs, utilisant le QRH etc.), mais il manque quelque chose que les livres peuvent difficilement apprendre : le passage de la théorie à la pratique, que jappelle les opérations.
J'aimerais inaugurer une potentielle série de tutoriel à ce sujet, qui ne couvriront pas les systèmes en profondeur (sauf si nécessaire), mais les aspects pratiques.
Pour ceux qui ne le savent pas encore, je vole sur le vrai B737-800 et je calquerai les procédures de ma compagnie dans des exemples pour imager le sujet.
Maintenant que lintroduction est faite, comm'ençons avec le premier sujet.
Noise abatement procedure / Procédures anti-bruit.
Bien que les avions soient de plus en plus silencieux et plus économe, la population se veut de plus en plus réticente à l'idée d'avoir un engin qui gronde au dessus de leur tête. Il a donc fallu mettre en place des règles pour réduire les nuisances sonores.
Sources
Les procédures anti-bruits peuvent être divisées en trois catégories.
1. Les procédures en vols:
Continuous Descent Arrival (CDA)
L'idée est qu'à partir du moment où l'avion commence sa descente (TOD), l'avion ne fait aucun palier jusqu'à l'atterrissage.
Cela réduit la consommation, les émissions, ainsi que le bruit. Bien que l'idée semble parfaite, elle possède quelques contraintes. Les contrôleurs doivent gérer le flux pour permettre ces descentes et les pilotes doivent pouvoir la réaliser.
Sur B737, nous utilisons un maximum la fonction VNAV du FMS. VNAV va créer une route qui part de la piste avec un plan de 3° (sauf si approche différente) jusqu'au FAP/FAF. Il va calculer la pente pour permettre la décélération et respecter les contraintes de vitesses et daltitude et ainsi déterminer le TOD. Lordinateur la calcule sur base d'une vitesse qui va dépendre du CI mais qui peut à tout moment être changée dans le cas d'une nouvelle instruction de lATC.
Lorsque les vents sont entrés correctement et qu'ils respectent la réalité, VNAV fonctionne vraiment pas mal.
Quelques infos supplémentaires sur mes autres posts: ici
J'essaierai de faire une vidéo qui explique l'utilisation de VNAV en profondeur, mais cela risque de me prendre pas mal de temps.
Noise Abatement Departure Procedures (NADP)
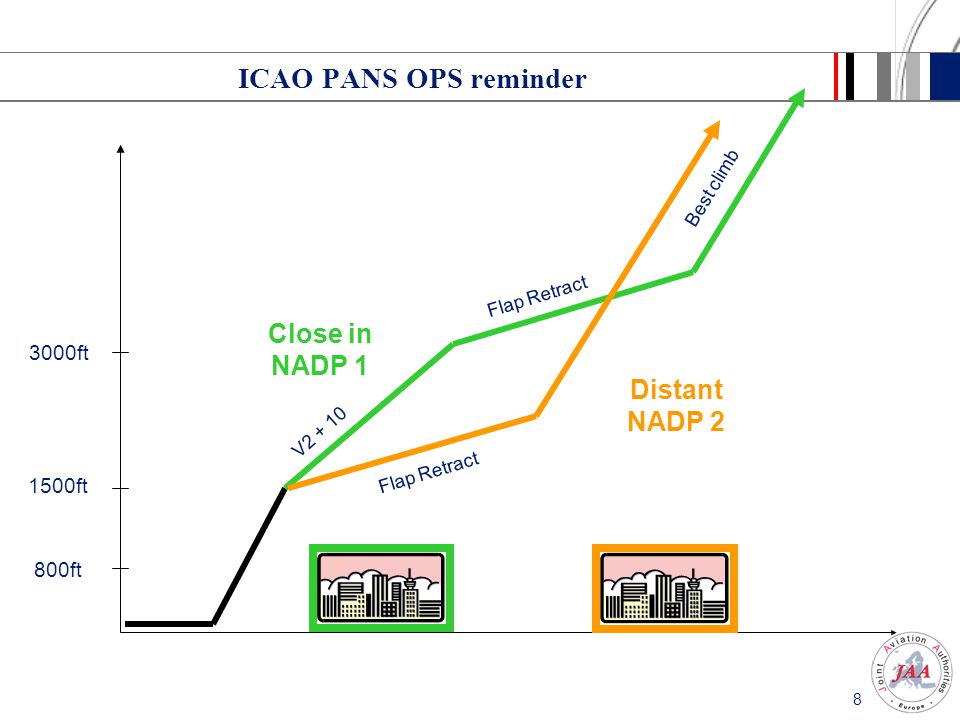
C'est le profile vertical de l'avion au décollage. Il existe deux types de départ qu'on appelle NADP 1 et NADP 2.
NADP 2 est la plus courante et est utilisée lorsque lobstacle (ou la zone de bruit) est éloignée tandis que le NADP 2 est utilisée lorsque lobstacle ou la restriction sont proches, comme vous pouvez le voir sur l'image ci-dessous. Il existe d'autres départ, comme par ex à Dublin (EIDW), qui utilisent une procédure hybrique.
Attention: petite erreur dans l'image, ce n'est pas 1500 ft, mais 800 ft.
NADP 1:
========================
[Décollage -----> 800 ft AAL]
- l'avion doit garder sa puissance de décollage
- maintenir V2 à V2 + 10kt
- maintenir ses volets
[800 ft AAL ---------> 3000 ft AAL]
- réduction de puissance (automatique sur B737, le FMA passe à N1, options de réglage dans le CDU page 2 de Take Off)
- V2 + 10kt à V2 + 20kt
[3000 ft AAL]
- acceleration pour rentrer les volets
- vitesse libre
========================
NADP 2:
[Décollage -----> 800 ft AAL] identique
- l'avion doit garder sa puissance de décollage
- maintenir V2 à V2 + 10kt
- maintenir ses volets
[800 ft AAL ---------> 3000 ft AAL]
- acceleration pour rentrer les volets
- maintenir une vitesse appropriée pour un MAX RATE OF CLIMB (-UP sur B737)
[3000 ft AAL]
- vitesse libre
En pratique sur B737, la vitesse sur le MCP est réglée sur V2. En passant l'altitude daccélération, on accélère en réglant la vitesse sur -UP et nous rentrons les volets.
Pour info, nous pouvons rentrer les volets à 1° en passant le pointeur blanc, avec un vecteur daccélération positif. En passant le -1 avec un vecteur daccélération positif, nous pouvons rentrer les volets (UP). Une fois que les volets sont entièrement rentrés et au dessus de 3000 ft, nous pouvons sélectionner un mode de montée (LVL CHG, VNAV, VS) et accélérer.
Modified approach angles, staggered, or displaced landing thresholds
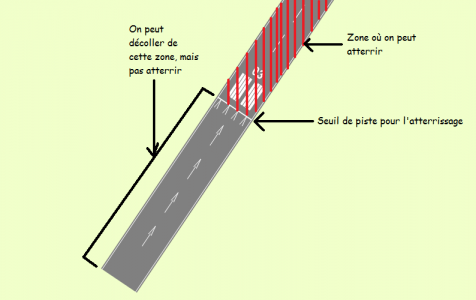
Pas grand chose à dire ici. En général la pente d'approche est de 3°, l'aéroport peut décider de créer une pente différente pour les obstacles/bruit.
La zone d'atterrissage peut aussi être déplacée, toujours dans le but d'être plus haut au point "sensible".
Low power/low drag approach profiles
Retarder la sortie des volets et du train d'atterrissage permet de réduire la traînée et ainsi la puissance moteur nécessaire pour maintenir la vitesse.
Dans ma compagnie nous sortons le train à 4nm en VMC et 5 nm en IMC, avant quoi nous avons 5° de volets. De quoi faire peur certains pilotes de ligne qui rejoignent la boite
Plus d'information sur d'autres posts: ici
Minimum use of reverse thrust after landing
Certains aéroport ont des contraintes quand à l'utilisation des inverseurs de poussée, généralement après une certaine heure.
2. La gestion de lespace aérien:
Noise preferred arrival and departure routes
Flight track dispersion or concentration
Noise preferred runways
C'est beaucoup plus simple que la première partie alors je vais résumer le tout. En fonction des heures, certaines procédures de départ ou darrivée (SID/STAR) seront davantage utilisés que d'autres pour réduire le bruit. L'aéroport de Barcelone est un très bon exemple.
Certaines pistes sont aussi préférée à d'autres, même si le vent n'est pas favorable. Nombreuses de ces pistes sont approuvée jusqu'à 15kt de vent arrière. En tant que pilote, il faut alors bien gérer sa décélération pour ne pas arriver trop vite et éviter une "High Energy Approach (HEA)".
3. La gestion du bruit au sein de l'aéroport:
Hush houses and engine run up management (location/aircraft orientation, time of day, maximum
thrust level)
APU management
Taxi and queue management
Towing
Taxi power control (Taxi with less than all engines operating)
Certains aéroport limitent l'utilisation de l'APU à seulement quelques minutes après l'arrivée / avant le départ. On préconise également le roulage sur 1 seul moteur (dans le cas d'un bi-moteur).
Sur B737, nous avons une période de refroidissement de 3 minutes avant de pouvoir couper un moteur (en opération normale, pour éviter un choc thermique. En cas d'urgence ou dévacuation, cette règle n'est évidemment pas dapplication).
===============================
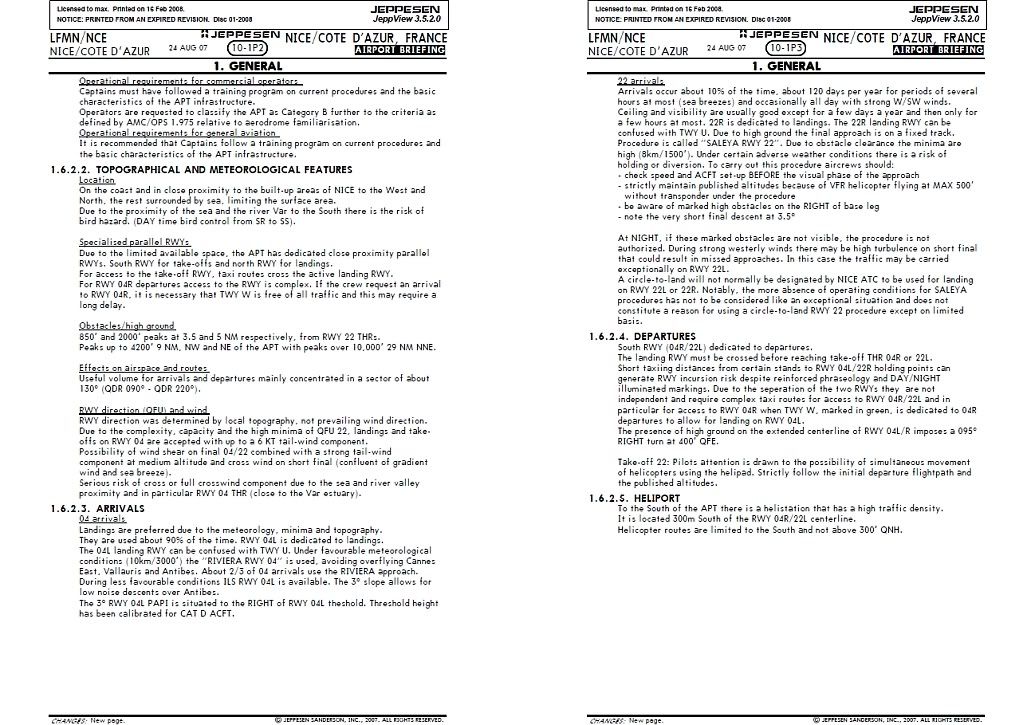
Toutes les informations sont contenues dans les cartes d'approches de votre aéroport de destination (catégorie GEN). Dans ma compagnie, nous avons également un briefing pour chaque aéroport qui résume ces particularités.
===============================
Voilà qui termine ce premier tutoriel. Je pense que le prochain sujet sera le prochain sujet portera sur le setup du CDU, mais n'hésitez pas à proposer les sujets que vous souhaitez développer.
Amicalement
Tim
")





")